精品无码三级在线观看视频_日韩欧美在线精品一区二区_日韩欧美国产成人_日本精品国产乱码久久久久的蜜桃_欧美成人精品三级网站
�O(sh��)�����(y��)
�����ղ�
���w����
�W(w��ng)վ���(y��)
��˾��(ji��n)��
�a(ch��n)Ʒչʾ
��Ĥ�����ֲ��y(c��)ԇϵ�y(t��ng)
��Ĥ����������ϵ�y(t��ng)
�����l(f��)�Ĥ
��Ĥ����������
���ʽ��Ĥ����������
��Ĥ�λӋ(j��)
����������
��Ĥ�ضȂ�����
�a(ch��n)�I(y��)��(d��ng)�B(t��i)
��˾��
�ИI(y��)��
�a(ch��n)Ʒ��
�͑�����
��I(y��)չ��
ӆ������
�\(ch��ng)Ƹ��Ӣ
(li��n)ϵ�҂�
�����ֲ��y(c��)ԇϵ�y(t��ng)��(bi��o)��
��Ĥ�����ֲ��y(c��)ԇϵ�y(t��ng)
�����ֲ����y(c��)ϵ�y(t��ng)
��(ji��n)���͉����ֲ����y(c��)ϵ�y(t��ng)
��yʽ�������y(c��)ϵ�y(t��ng)
���w�����ց����y(c��)ϵ�y(t��ng)
�㲿�����ֲ����y(c��)ϵ�y(t��ng)
���������ֲ����y(c��)ϵ�y(t��ng)
݆̥�����ֲ����y(c��)ϵ�y(t��ng)
��ˢ�����ֲ����y(c��)ϵ�y(t��ng)
�����ֲ��y(c��)ԇϵ�y(t��ng)��(bi��o)��
��Ĥ����������ϵ�y(t��ng)
����������
��Ĥ����������
���W(xu��)ԇ�(y��n)�C(j��)
MEMs����������
�����y(c��)��ϵ�y(t��ng)
���B(t��i)����ϵ�y(t��ng)
���漡늜y(c��)ԇϵ�y(t��ng)
�\(y��n)��(d��ng)��ϵ�y(t��ng)
�\(y��n)��(d��ng)�y(c��)��ϵ�y(t��ng)
��ͨ�������ϵ�y(t��ng)
�����ֲ��y(c��)��ϵ�y(t��ng)
�o(w��)���������y(c��)ԇϵ�y(t��ng)
�����l(f��)�Ĥ
��Ĥ����������
���ʽ��Ĥ����������
��Ĥ�λӋ(j��)
����������
��Ĥ�ضȂ�����
�ضȂ������ɼ���
��Ĥ�K���ضȂ�����
����NTC�ضȂ�����
���w������
>�K���L(zh��ng)�@��늿Ƽ�����˾
>��ַ�����Kʡ�����г����ؽ���(j��ng)��(j��)�_(k��i)�l(f��)�^(q��)�ĺ�·11̖(h��o)����Ƅ�(chu��ng)�@407
>�]����215500
>(li��n)ϵ��:��С��
>�Ԓ��0512-51910068
>���棺
>E-mail��18018176686@189.cn
>> �W(w��ng)ַ��
www.www.mentressmoon.com
���λ�ã�
���(y��)
>>
�a(ch��n)Ʒչʾ
>>
��Ĥ�����ֲ��y(c��)ԇϵ�y(t��ng)
>>
�����ֲ��y(c��)ԇϵ�y(t��ng)��(bi��o)��
�����ֲ��y(c��)ԇϵ�y(t��ng)��(bi��o)��
�R���ֲ��u(p��ng)���Üy(c��)������
��(l��i)Դ:��Ĥ���������������ֲ� | �l(f��)���r(sh��)�g:2019/8/2 10:21:48 | �g�[�Δ�(sh��)��
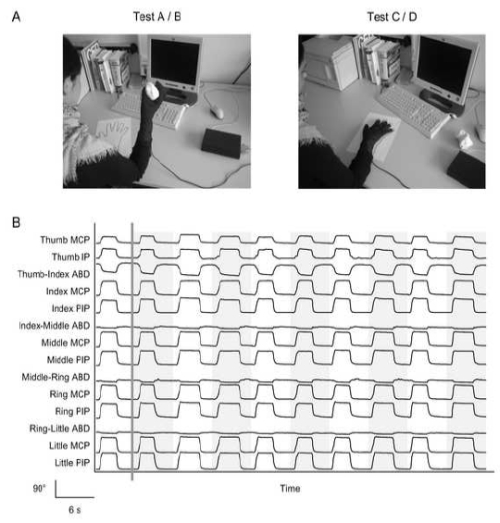
���������� �������ף��еȳߴ磩�ɿ���s�ȼ�(j��)��Lycra®���ƶ��ɡ����ֱ���(c��)�����Ɍ�Lyrca®�p����һ���Ա㌢����������Ɍ�֮�g���D1��������2�����ƹǣ�MCP���ͽ���ָ�g�P(gu��n)��(ji��)��PIP���ı���(c��)����10��(g��)2''����������(du��)��Ĵָ����������������MCP��ָ�g�P(gu��n)��(ji��)��IP���ϡ����˂�������ĩ�˿����c�h(yu��n)�˂������دB���@�ӿ��Ԍ���������ѵط�����MCP��PIP�P(gu��n)��(ji��)�ϣ��D1c������_������������(hu��)�x�_(k��i)��λ�ã�����p�������Ľ��ˣ��D1a��b��c�еļ��^������չ��ABD���������Ɂ�(l��i)��ͬһ�����̵��Ă�(g��)1Ӣ��������M�ɣ�������ʳָ���g���Эh(hu��n)�͟o(w��)��Сָ֮�g�İ�A�����У��D1b��������ɂ�(g��)��ָ����չ���������Ĺ̶��˱����_(k��i)����(d��o)�����돽���Ķ����͂�������衣Ĵָָ��(sh��)��չ�������̶���Ĵָ��ʳָ֮�g�����ײ����ϡ� �D1������14��(g��)�����������ף����ڜy(c��)����������չ�\(y��n)��(d��ng)����a�������ҕ�D������2���10��(g��)���������������ƹǣ�MCP���ͽ���ָ�g�P(gu��n)��(ji��)��PIP���ı���(c��)����(du��)��Ĵָ����������������MCP��ָ�g�P(gu��n)��(ji��)��IP���ϡ����˴_������������(hu��)�x�_(k��i)������λ�ã��������̶�������һ�ˣ���ɫ���^������ɫ�̾��α�ʾ��չ�������ĸ�ҕ�D����b������ǰҕ�D��T��ʾĴָ��I��ʾʳָ��M��ʾ��ָ��R��ʾ�o(w��)��ָ��L��ʾСָ�����Ă�(g��)��չ��ABD��������������ʳָ���g���Эh(hu��n)�͟o(w��)��Сָ֮�g�İ�A�νY(ji��)��(g��u)�С�Ĵָָ��(sh��)��չ�������̶���Ĵָ��ʳָ֮�g�����ײ����ϡ���c������ָ���g���_(k��i)�����ֵı��棬�Ɍ�Lyrca®���p����һ���@�ӂ������Ϳ��Բ���Ɍ�֮�g�����˂�������ĩ�˿����c�h(yu��n)�˂������دB���@�ӿ��Ԍ�������������MCP��PIP�P(gu��n)��(ji��)�ϡ���d���������еȴ�С�ֵ���ԇ�ߵĈD�� �����(y��n)�C�������ľ��ԣ���3����ԇ�����u(p��ng)���������Ђ�������У��(zh��n)������������ԇ�ߵ��ִ�С���е����ஔ(d��ng)��7.5̖(h��o)��������������ԇ�ߵ��ִ�С��С���ஔ(d��ng)��6̖(h��o)�������y(c��)�ǃx��1��ֱ��ʣ��{(di��o)����0��15��30��45��60��75��90�㣨Ĵָ?j��ng)�������?0�㣩����������ÿ��(g��)�P(gu��n)��(ji��)�ı���(c��)����(d��ng)�P(gu��n)��(ji��)���ֺ㶨�Ƕȕr(sh��)��ӛ���������(du��)����չ����������ԇ�ߌ�ƽ�ַ���һ�������ϣ���(bi��o)ӛ�ǶȞ�0��5��10��15��20��25��30�㡣��(du��)ÿ��(g��)��ԇ���؏�(f��)�˳������Σ�����ƽ��ֵ����У��(zh��n)������ ��������̖(h��o)�{(di��o)��(ji��) ��������|�����0.15 m m���L(zh��ng)��1.5 m�������������x�Ŀ��{(di��o)��Ԫ���{(di��o)��(ji��)��Ԫ��14��(g��)������{(di��o)�ķŴ����·�M�ɡ��ĺ�Ă�����2�����Ƿ��D(zhu��n)�Ŵ����ķ�����裬�Ķ�ʹ���׃����rsensor��new���ͷŴ���ݔ��늉�֮�g���ھ����P(gu��n)ϵ���D2����14��(g��)�Ŵ�����늉���ģ�M/��(sh��)�֣�A/D���D(zhu��n)�Q��12λ��������A/D����Labjack U3��Labjack Corporation��Lakewood��Co��USA���D(zhu��n)�Q����ͨ�^(gu��)USBݔ�낀(g��)��Ӌ(j��)��C(j��)����������̖(h��o)��50��Ɲ�ɘӣ���ͨ�^(gu��)�����_(k��i)�l(f��)��Javaܛ����(xi��)�딵(sh��)��(j��)�ļ����������ֱ��ʼs��0.1�㣬����ͨ�^(gu��)���`����{(di��o)��(ji��)�O(sh��)���M(j��n)һ����ߣ����磬���S��(du��)ÿ��(g��)�Ŵ��·�M(j��n)�ІΪ�(d��)��ݔ��늉����m��(y��ng)�����⣬߀�ṩ�˂�������̖(h��o)�����ݔ���� �D2�������������׃���D(zhu��n)�Q�锵(sh��)��늉���̖(h��o)���{(di��o)��(ji��)�·���ڷǷ���Ŵ����ķ���·���в��뽛(j��ng)�^(gu��)�ĵĂ�����2���Ķ�ʹ���׃���c�Ŵ���ݔ��늉�֮�g���ھ����P(gu��n)ϵ���ں㶨ݔ��늉�uin�µ��D(zhu��n)�Q�������ͨ�^(gu��)�λӋ(j��)r�M(j��n)���{(di��o)����14��(g��)�Ŵ�����늉�ͨ�^(gu��)����A/D����12λ�D(zhu��n)�Q��A/D����ͨ�^(gu��)USBݔ�낀(g��)��Ӌ(j��)��C(j��)�� �؏�(f��)�Ԝy(c��)�� �����ĺ�ľ��Ԃ���������2����������̖(h��o)�cC֮�g���P(gu��n)ϵ ������2��ľ��Ԃ��������ԣ���������̖(h��o)�c����(y��ng)�����Ƕ�֮�g���P(gu��n)ϵ��ÿ��(g��)�������Ľ^��(du��)������С��̖(h��o)ֵ�_������ԇ�߲��ò�ͬ���ֲ��˄�(sh��)��ƽ�֣���ָ��չ��С��ȭ�^��ƽ�֣���ָ��չ���3��(g��)10��ӛ��Ы@����С�����ֵ����Сֵ�c0�����P(gu��n)�������ֵ�c���ʴ_����ÿ��(g��)�P(gu��n)��(ji��)������Ƕ����P(gu��n)��Beers��Berkow��1999�꣩���҂��ų��˂���������������ָ������ǶȵĿ����ԣ�Ҫ���λ��(j��ng)�(y��n)�S�����������y(c��)��ʳָMCP��PIP�P(gu��n)��(ji��)��һ��(g��)��ԇ�ߴ��ϻ�������r�µ��\(y��n)��(d��ng)�������](m��i)�аl(f��)�F(xi��n)�������У��(zh��n)����](m��i)���ܵ�����������Ӱ푡� ��5����ԇ�ߣ�3�����Ժ�2��Ů�ԣ����M(j��n)����4���؏�(f��)��ԇ�(y��n)���cǰ��������ԇ�(y��n)��ƣ�Wise���ˣ�1990�꣩����ÿ��(g��)��ԇ��������ʯ��ģ���Դ_��ԇ�(y��n)A��B�е�ָ�P(gu��n)��(ji��)�܉�ʼ�K������ͬһλ�á���ԇ�߱�Ҫ��ͨ�^(gu��)Ĵָ�c������ָ����(du��)�D��ģ�͉K��(l��i)��(chu��ng)��һ��(g��)�A�������w����(d��ng)�|(zh��)��׃Ӳ��~20��犣����ճ��˄�(sh��)�����؏�(f��)��ͬ����?y��n)��о����������?hu��)Ӱ표y(c��)ԇ���ȣ������҂���ѭDipietro����ͬ�µĽ��h��ָ��(d��o)��ԇ�߱M���ܵ����^С�����ճ�ģ�ߣ�Dipietro���ˣ�2003�꣩�� �y(c��)ԇA��ģ�ߊA�ֺ�����֮�g�Ĕ�(sh��)��(j��)�ɼ� ��ԇ�(y��n)ּ���������A�����ճ��˄�(sh��)���؏�(f��)�ԡ���ԇ�ߵ��������ƽ���������ϵġ��ڰl(f��)��ͨ���̖(h��o)����ԇ�߾o��ʯ��ģ��ֱ��6���(sh��)��(j��)ӛ�ֹͣ��Ȼ���ֻص�ƽ̹λ�ã��_(k��i)ʼ��һ��ԇ�(y��n)��ӛ���10��(g��)ԇ�K��ÿ��(g��)ԇ�K��10��(g��)ԇ�(y��n)�M�ɡ���ԇ�ߛ](m��i)��ժ�|�K֮�g�����ס� �y(c��)ԇB����(sh��)��(j��)�ɼ�֮�g��ģ�ߊA�ֺ������P(gu��n)�] �y(c��)ԇB����ڜy(c��)ԇA��ֻ��������ÿһ�K֮ǰ��ȡ�²����´��ϡ��ڴˣ���(du��)��Ó��Ӱ��M(j��n)���������� �y(c��)ԇC����(sh��)��(j��)�ɼ�֮�g��ƽ�ֺ����� �����u(p��ng)������λ�õ�һ���ԣ���ԇ�ߌ�������ƽ�ַ���һ�������ϣ���ָλ�Ø�(bi��o)ӛ���ڰl(f��)�����ߡ���̖(h��o)����ԇ���M(j��n)����������ָ�ď����\(y��n)��(d��ng)������~3 s��֏�(f��)��ƽ��λ�á�ӛ���6 s��ֹͣ��ͬ�ӣ�ӛ���10��(g��)��10��(g��)ԇ�(y��n)�M�ɵĉK��ÿ��(g��)ԇ�(y��n)��10��(g��)�� �y(c��)ԇD����(sh��)��(j��)�ɼ�֮�g��ƽ�ֺ������P(gu��n)�] �@�(xi��ng)�y(c��)ԇ����ڜy(c��)ԇC��ֻ��������ÿ��(g��)���K֮ǰ��ȡ�²����´��ϡ� �Ñ��{(di��o)��� ����(j��)Simone����ͬ�¸ľ����Ñ�(w��n)������1������(du��)���ײ�����������m�Եķ����M(j��n)���u(p��ng)����Simone���ˣ�2007�꣩��ÿһ��(g��)�(xi��ng)Ŀ��10����ԇ�߰���1����(qi��ng)�Ҳ�ͬ�⣩��7����(qi��ng)��ͬ�⣩�ķ����M(j��n)���u(p��ng)�С� �y(t��ng)Ӌ(j��)���� �ؚw������r2ֵ����У��(zh��n)�����ľ��Ԝy(c��)���������M(j��n)���؏�(f��)�Է�����ÿ��(g��)ԇ�(y��n)�����20��(g��)�ӱ��M(j��n)��ƽ�����Ԍ���(sh��)��(j��)�p�ٵ�14��(g��)����ԇ�(y��n)�Y(ji��)���˄�(sh��)���o�B(t��i)�P(gu��n)��(ji��)�Ƕȡ���ǰ������Dipietro���ˣ�2003�꣩��ÿ��(g��)ԇ�(y��n)��100��ԇ�(y��n)�ɱ�ʾ�����S���xijk������i=1��10��ʾ��i��ԇ�(y��n)��j=1��10��ʾ��j��(g��)ԇ�K��k=1��14��ʾ��k��(g��)���������؏�(f��)�Ԝy(c��)���Ĝ�(zh��n)�_�ȱ������鷶�����������͘�(bi��o)��(zh��n)ƫ�sd����Dipietro���ˣ�2003�ꣻSimone���ˣ�2007�꣩����(du��)��ÿ��(g��)�؏�(f��)��ԇ�(y��n)��ÿ��(g��)��ԇ�ߣ�����Ӌ(j��)�����£� Ӌ(j��)��sd��xjkֵ�Ę�(bi��o)��(zh��n)ƫ��P(gu��n)��(ji��)����ԇ�ߵĘ�(bi��o)��(zh��n)��ͷ���ֵƽ���� ͨ�^(gu��)�M��(n��i)���P(gu��n)ϵ��(sh��)��ICCS���u(p��ng)��ÿ��(g��)�y(c��)ԇ�Мy(c��)��ֵ֮�g�Ŀɿ��ԡ�ͨ�^(gu��)��ÿ����ԇ���S�C(j��)�x��ăɂ�(g��)ԇ�K���S�C(j��)�x��ɂ�(g��)ԇ�(y��n)��Ӌ(j��)��ÿ��(g��)ԇ�(y��n)��ICCֵ��Ӌ(j��)���˃ɂ�(g��)ԇ�(y��n)�����20��(g��)�ӱ���ƽ���Ƕȡ�Ȼ����(l��i)��������ԇ�ߵ�ÿ��(g��)�P(gu��n)��(ji��)�ĽǶȌ�(du��)�R����һ��Ӌ(j��)��ÿ��(g��)�P(gu��n)��(ji��)��ICC��Shrout��Fleiss��1979����ICC��Ӌ(j��)���ǻ�����ԇ��֮�g����ԇ�߃�(n��i)����ı��^��������ԇ�߃�(n��i)�����ӳ�˜y(c��)���`������ԇ�߃�(n��i)�����^�ͣ�ICC�ӽ�1���y(c��)���Y(ji��)�����J(r��n)���ǿɿ��ġ��෴�����ICC�ӽ�0������ĺܴ�һ����i �����ط���������ڱ��^У��(zh��n)����ԇ��֮�g��r2ֵ�����Д�(sh��)ֵ����ʾ��ƽ��ֵ����(bi��o)��(zh��n)ֵ�� �Y(ji��)��-�������u(p��ng)�� �������A�S푑�(y��ng) �����u(p��ng)����������̖(h��o)�ķ�(w��n)���ԣ���D3a��ʾ�����������B�ӵ��ք�(d��ng)�Ƕ�Ӌ(j��)�ϡ���40 s�ď����^(gu��)���Мy(c��)ԇ��6��(g��)����������ɫ����ʾÿ��(g��)������3��(g��)�y(c��)�����ڵ�ƽ��ֵ����ɫ����ʾ������֮�g��ƽ��ֵ����t5�r(sh��)�����Ђ������������m(x��)�½�6.3��1.4%��Ҋ(ji��n)�D3b����������T1-T4�r(sh��)��ƽ��˥�p�ٷֱȣ�������(g��)�������е�����(g��)��58��犵ď����^(gu��)���б��~��O(ji��n)�ء��Y(ji��)����������ˎ���^�m(x��)�½��s30��犣�T8����Ȼ������(du��)��(w��n)�����y(c��)���Y(ji��)���r(sh��)������50��犺�t10����ƽ��˥�p��16.8��4.9%���D3b��������壩�� ��1��t5���D3b��������壩̎�Ă���������½���-1.0��0.8%����ԭ��(l��i)�Ă���������6�������⣬����(g��)�������е�����(g��)��豣�ַ�(w��n)����-1.9��1.0%����ֱ���A�S푑�(y��ng)��50��犣�t10�������һ�Μy(c��)�����D3b��������壩�����Еr(sh��)�g�c(di��n)�ĽY(ji��)���@ʾ�ڈD3������(y��ng)����С���ˣ�ͨ�^(gu��)����(du��)��(ji��n)�ε��ģ������������ʽ�������������ڿɿ��y(c��)����ָ�\(y��n)��(d��ng)��һ��(g��)��Ҫȱ�c(di��n)�����ʽ�����������ĵڶ���(g��)����Ҫ�����ԷǾ����О�ͨ�^(gu��)��2�õ��a(b��)���� �D3����������ǰ��Ă���������׃������a���b�Ђ������Ĝy(c��)�ǃx��ͨ�^(gu��)���D(zhu��n)�y(c��)�ǃx��Ԫ�������������ԏ������κ���Ҫ�ĽǶȡ���b����6��(g��)����������ɫ����ʾÿ��(g��)���������Μy(c��)���е�ƽ��ֵ����ɫ����ʾ���Ђ�������ƽ��ֵ���У��ڏ������s60���40 s���g��������壩�ͣ�������壩��1��ӛ䛂���������׃��������(g��)�������е�����(g��)����ǰ��������壩���ĺ�������壩�M(j��n)�Мy(c��)ԇ���y(c��)ԇ�l�����m(x��)60��犡��քe�@ʾT1-T5��T6-T10��ƽ��˥�pֵ�����@�ɷN��r�£���1�����p�����A�S���ܺ����������˥�p����c�����������׃���c�����Ƕȣ�У��(zh��n)������֮�g���P(gu��n)ϵ��ȡ�Q����1��ƽ���ڂ��������õ����ֵ�������M(j��n)�б��^��ÿ��(g��)У��(zh��n)�������������c1���P(gu��n)����С����c0���P(gu��n)����ɫ��ʾ��(j��ng)�(y��n)�_����У��(zh��n)����������ɫ��ʾ����У��(zh��n)������ģ�M���](m��i)��ƽ����裨rparallel=�ޣ��c(di��n)�ھ���������(j��)�Ӽ��е�r2ֵ�M(j��n)��������У��(zh��n)�����ľ��Զ���ã���(li��n)�����15k����20k��֮�g����(sh��)ʩ�r(sh��)�����ֵ��18 k������(sh��)�ĺھ������ļ�2���� ���������� �ڸ��M(j��n)1�Ļ��A(ch��)�ϣ���(du��)�������ľ��Զ��M(j��n)�����u(p��ng)��������(qi��ng)����D3c��ʾ��ͨ�^(gu��)��һ��(g��)���ƽ���ڂ��������ļ�2����(l��i)��У��(zh��n)�������Π����(j��)�o(w��)ƽ��R�Ă�������У��(zh��n)������Ӌ(j��)����@�þ����P(gu��n)ϵ��ƽ���������ֵ����裨�D3c����ɫ̓������ƽ���ڂ��������õIJ�ͬ���ֵ��1��5��10��15��20��50��200 kO���Ĕ�(sh��)ֵģ�M�a(ch��n)����У��(zh��n)������θ�׃���Π���A(y��)�y(c��)���D3c����ɫ��(x��)������ģ�MУ��(zh��n)���������ֵ����ߵ�r2ֵ�������Ѿ�����15-20 k��������(n��i)���D3c���Ӽ����@ʾ��һ��(g��)������r2ֵ�б�����ɫ�l��ʾģ�MУ��(zh��n)������r2ֵ����ɫ�l��ʾ��(j��ng)�(y��n)�Դ_����У��(zh��n)������r2ֵ�������ˌ�(sh��)�F(xi��n)�˹��ܣ���һ��(g��)ֵ��18 k�������ƽ���ڂ��������ã����Ҵ_�����µĽ�(j��ng)�(y��n)У��(zh��n)�������D3c����(sh��)�ĺھ���r2=0.9975������(du��)����չ����������Ƶ��x����47 k�������ֵ�� �����ڲ�ͬ�돽�����r(sh��)��������У��(zh��n)������(hu��)�l(f��)��׃����Simone��Kamper��2005�꣩��������Ƕ���14��(g��)�������ڲ�ͬ�ֳߴ����ԇ���еľ��Կ��ܕ�(hu��)������ͬ�����˽�Q�@һ�c(di��n)�����еĂ��������ڃ���������ԇ�����ք�(d��ng)У��(zh��n)��һ��Ů����ԇ�����ք�(d��ng)У��(zh��n)����һ��Ů����ԇ�ߵ��քt�^С����(du��)��ÿ��(g��)��ԇ�ߣ����ԓ������Ҫ�s30��犡�������ԇ�ߵ�ƽ��r2ֵ��0.9855��0.9980֮�g����ƽ��ֵ��0�������ڲ�ͬ�돽�����r(sh��)��������У��(zh��n)������(hu��)�l(f��)��׃����Simone��Kamper��2005�꣩��������Ƕ���14��(g��)�������ڲ�ͬ�ֳߴ����ԇ���еľ��Կ��ܕ�(hu��)������ͬ�����˽�Q�@һ�c(di��n)�����еĂ��������ڃ���������ԇ�����ք�(d��ng)У��(zh��n)��һ��Ů����ԇ�����ք�(d��ng)У��(zh��n)����һ��Ů����ԇ�ߵ��քt�^С����(du��)��ÿ��(g��)��ԇ�ߣ����ԓ������Ҫ�s30��犡�������ԇ�ߵ�ƽ��r2ֵ��0.9855��0.9980֮�g����ƽ��ֵ��0.9915��0.0031���������ԶȺܸߡ��Ă�(g��)�P(gu��n)��(ji��)��ʾ����D4a��ʾ���@ʾ��r2ֵ��ʾ��ԇ�ߵ�ƽ��ֵ����С���Ƴߴ�Ů����ԇ�ߣ�0.9881��0.0086���P(gu��n)��(ji��)̎��ƽ��r2ֵ�^�����Ƴߴ�������ԇ�ߣ��քe��0.9942��0.0058��0.9921��0.0064����С������o(w��)�y(t��ng)Ӌ(j��)�W(xu��)���x�����������F(xi��n)=2.78��P=0.07������ˣ���2��ľ��ԶȃH�ܲ�ͬ�ֳߴ���pӰ푡����˫@�ý^��(du��)��ѵ����ԣ����Ԍ�(du��)��С�ֺʹ�������������ą���(sh��)�M(j��n)�Ѓ�(y��u)���� �D4�����׃�(n��i)�Â��������ĺ�2���ľ��Զȡ���a��������ԇ�����Ă�(g��)�����P(gu��n)��(ji��)�����l��(j��ng)��(j��ng)�(y��n)�_���Ę�(bi��o)��(zh��n)��У��(zh��n)������ƽ��ֵ����ԇ���@ʾ��ƽ��r2ֵ�ӽ�1���������ԶȺܸߡ���һ����ԇ���У�����y(c��)����-15��ij����졣�Y(ji��)���������ڳ������^(gu��)���У��������c�����������(sh��)֮�g�](m��i)�б��־����P(gu��n)ϵ����b�����ǣ��҂��؏�(f��)�˃�(y��u)������ʹ��һ��(g��)0.1 mm������ϲ����ļ�1����һ��(g��)��(li��n)����1 k�����ļ�2�������b��һ��(g��)ԇ�(y��n)��(du��)���ԭ�������С��҂��l(f��)�F(xi��n)���ԾS����30�㳬���쵽90��ķ�����(n��i)����ˣ�ͨ�^(gu��)��(y��u)���ą���(sh��)�����Խ�Q���ʽ������������һ��ȱ�c(di��n)���o����ĴָIP������MCP��������ʾ���� ���ʽ������������һ��(g��)�ձ�ȱ�c(di��n)�Ǯ�(d��ng)���෴�������r(sh��)��(hu��)ͻȻʧȥ�`���ȣ�����y(c��)����ָ�dz���������`���ȡ����˽�Q��(d��ng)���������r(sh��)�������Ӱ푂������`���ȵĆ�(w��n)�}���҂�?c��)�һ��(g��)��ԇ�����Ϝy(c��)����MCP��ĴָIP���P(gu��n)��(ji��)�ij��죨-15�㣩����D4a��ʾ����(du��)�ڳ���չ�\(y��n)��(d��ng)���`���Ƚ��ͣ��������ľ����P(gu��n)ϵ�](m��i)�б��������ǣ��҂��؏�(f��)�˃�(y��u)���^(gu��)�̣���һ��(g��)���}�У�ʹ��һ��(g��)0.1 mm������ϱ�Ĥ���ļ�1����һ��(g��)1 k����ģ�M��(li��n)��裨�ļ�2�����b��ԭ�������С��҂��l(f��)�F(xi��n)�����@Щ����(sh��)������MCP��IP�P(gu��n)��(ji��)��ƽ��r2��0.9965��0.0048��ʾ��Ҋ(ji��n)�D4b����(n��i)��MCP��Ĵָ���P(gu��n)��(ji��)�ľ��ԾS����30�㳬����90�㏝��������(n��i)��IP��60�������������ˣ��҂��ĸ��M(j��n)�����܉��Q���ʽ��������������һ��(g��)ȱ�c(di��n)����(j��)�҂���֪���@�ǵ�һ���C�������ָ�\(y��n)��(d��ng)������(g��)���������þ��Ի���菝����������(l��i)�y(c��)������?y��n)��҂��(c��)�Ŀǰ���о��Л](m��i)�Мy(c��)���^(gu��)����չ�\(y��n)��(d��ng)������Ŀǰ�ĽY(ji��)���](m��i)�б��Ɖġ���δ��(l��i)������(g��u)����ʹ�þ����@Щ����ą���(sh��)�Ă��������ס���Ŀǰ��ֹ���҂������C�����������ĸ��M(j��n)����˂����������ԣ��@�ǿɿ��y(c��)�������ָ�\(y��n)��(d��ng)���țQ�l��������һ���У��҂������˂����������؏�(f��)�ԺͿɿ��ԡ� �؏�(f��)�ԺͿɿ��� ʹ��ÿ��(g��)�P(gu��n)��(ji��)��������С������ֵУ��(zh��n)���ף���������ָ�g�P(gu��n)��(ji��)���^(gu��)����չ��Ĵָָ�g�P(gu��n)��(ji��)����У��(zh��n)�DZ�Ҫ�ģ����{(di��o)����������������ͬ���ִ�С��������(g��)У��(zh��n)���ڃ�(n��i)����Сֵ�����ֵ���Ƿ�(w��n)���ģ���(sh��)��(j��)δ�@ʾ�����@�������ܺõ��N����ԇ�ߵ����ϣ�������У��(zh��n)�^(gu��)���Л](m��i)���Ƅ�(d��ng)�� �D5a�f(shu��)������Ҫ��ԇ�(y��n)���š���ԇ�(y��n)A��B����D���У���(du��)���A�����ճ��˄�(sh��)���؏�(f��)���M(j��n)������������ԇ�ߵ��������ƽ���������ϵġ���һ��(g��)�Є�(d��ng)��̖(h��o)����ԇ�߾o�oץסʯ��ģ����(sh��)��(j��)ӛ䛽Y(ji��)�����ַŻ�ƽ̹λ�ã��_(k��i)ʼ��һ��ԇ�(y��n)���ڜy(c��)ԇC��D���u(p��ng)������ƽ��λ�õ�һ���ԣ��D5a���҈D�����@�õĵ��͂������x��(sh��)f�؏�(f��)�ԺͿɿ��� ʹ��ÿ��(g��)�P(gu��n)��(ji��)��������С������ֵУ��(zh��n)���ף���������ָ�g�P(gu��n)��(ji��)���^(gu��)����չ��Ĵָָ�g�P(gu��n)��(ji��)����У��(zh��n)�DZ�Ҫ�ģ����{(di��o)����������������ͬ���ִ�С��������(g��)У��(zh��n)���ڃ�(n��i)����Сֵ�����ֵ���Ƿ�(w��n)���ģ���(sh��)��(j��)δ�@ʾ�����@�������ܺõ��N����ԇ�ߵ����ϣ�������У��(zh��n)�^(gu��)���Л](m��i)���Ƅ�(d��ng)�� �D5a�f(shu��)������Ҫ��ԇ�(y��n)���š���ԇ�(y��n)A��B����D���У���(du��)���A�����ճ��˄�(sh��)���؏�(f��)���M(j��n)������������ԇ�ߵ��������ƽ���������ϵġ���һ��(g��)�Є�(d��ng)��̖(h��o)����ԇ�߾o�oץסʯ��ģ����(sh��)��(j��)ӛ䛽Y(ji��)�����ַŻ�ƽ̹λ�ã��_(k��i)ʼ��һ��ԇ�(y��n)���ڜy(c��)ԇC��D���u(p��ng)������ƽ��λ�õ�һ���ԣ��D5a���҈D�����Ĝy(c��)ԇC�е�һ��(g��)��ԇ�߫@�õĵ��͂������x��(sh��)��D5b��ʾ��10��(g��)ԇ�(y��n)��1��(g��)ԇ�K���Ĕ�(sh��)��(j��)�ļ����B�Ӳ���ҕ������(du��)��ÿһ��(g��)ԇ�(y��n)����ԇ�������������ƽ�ַ���һ�������ϣ���ָλ�Ø�(bi��o)ӛ���l(f��)��Go��̖(h��o)����ԇ���M(j��n)��������ָ�ď����\(y��n)��(d��ng)������~3s��ص�ƽ��λ�á�6 s��ֹͣӛ䛣���ʹ��ÿ��(g��)�P(gu��n)��(ji��)���20��(g��)�ӱ���ƽ��ֵ����һ��ԇ�(y��n)�ЈD5b�е����ɫ�Ӱ���Σ��M(j��n)�з�������ԇ�(y��n)B��D��ԇ�K֮�gȡ�����ס� �D5���؏�(f��)��ԇ�(y��n)ԭ������a����ԇ�(y��n)A��B����D���У���(du��)���³ʈA���ε��ճ��˄�(sh��)���؏�(f��)���M(j��n)������������ԇ�ߵ��������ƽ���������ϵġ��ڰl(f��)���Є�(d��ng)��̖(h��o)����ԇ�߾o��ʯ��ģ��ֱ��6���(sh��)��(j��)ӛ�ֹͣ��Ȼ���ֻص�ƽ̹λ�ã��_(k��i)ʼ��һ��ԇ�(y��n)��ӛ���10��(g��)ԇ�K����һ��(g��)ԇ�K����10��(g��)ԇ�(y��n)����ԇ�(y��n)B�У��ڃɂ�(g��)ԇ�K֮�gȡ�����ס��ڜy(c��)ԇC��D���҈D���У��u(p��ng)������λ�õ�һ���ԡ���ԇ�������ƽ�ַ���һ�������ϣ���ָλ���И�(bi��o)ӛ���ڰl(f��)��Go��̖(h��o)����ԇ���M(j��n)����������ָ�ď����\(y��n)��(d��ng)������~3 s��ص�ƽ��λ�á�ӛ���6 s��ֹͣ���ڜy(c��)ԇd�У������ڃɉK֮�g���Ƴ�����b��һ��(g��)���}��ÿ��(g��)�P(gu��n)��(ji��)��ԭʼ��(sh��)��(j��)����һ��(g��)�y(c��)ԇC�K�е�ʮ��(g��)��(sh��)��(j��)�ļ��B������(l��i)����ҕ������ͬ�ı���ɫ��ʾ��ͬ�Ĕ�(sh��)��(j��)�ļ���ÿ��(g��)��(sh��)��(j��)�ļ������20��(g��)�ӱ����ڷ��������ɫ�Ӱ���α�ʾ�c��a���е�ƽ��λ������(du��)��(y��ng)�ĵ�һ��(g��)��(sh��)��(j��)�ļ������20��(g��)�ӱ��� ����WISE����ͬ����ָ���ģ�WISE���ˣ�1990�꣩��������sdֵ�˴˸߶����P(gu��n)���D6a����r>0.99��Ƥ���d���P(gu��n)ϵ��(sh��)��������(j��)�������о���ƽ��ƽ���؏�(f��)�ԣ�����3.29���1.29�㣻sd1.07���0.42�㣩��(y��u)��ƽ�������؏�(f��)�ԣ�����6.63���1.86�㣻sd 2.10���0.56�㣩�����⣬��ȡ�������؏�(f��)�ԣ�����4.35���2.14�㣻��(bi��o)��(zh��n)ƫ��1.4���0.65�㣩��(y��u)��ȡ�K�g�����؏�(f��)�ԣ�����5.57���2.43�㣻��(bi��o)��(zh��n)ƫ��1.77���0.76�㣩�� ������ԇ���е�һ������ԇ��3�����ִ�>7.5�����@ʹ�ú��y������һֱ�������ϡ��@��ӳ����ԇ�ߵ��^�߷�����sdֵ�ϣ��e���ڜy(c��)ԇb��d�У��D6a��ɫ�����Σ������Y(ji��)������ԇ�ߵ�ƽ���؏�(f��)��ֵ�����c��2�������о��ĽY(ji��)���M(j��n)�б��^��߀Ӌ(j��)������ԇ�߸��P(gu��n)��(ji��)�ķ�����sdֵ���D6b��sdֵ�Ŀ�ҕ���������@�(xi��ng)�����У�����Ĵָָ��(sh��)ABD�������������P(gu��n)��(ji��)��SDֵ��0.96�㵽1.93��֮�g��������3.05��-6.16��֮�g���������P(gu��n)��(ji��)��SDֵ��3.65��֮�g��������11.01��֮�g���� �D6���؏�(f��)�Է����Y(ji��)������a������(j��)ԇ�(y��n)A-ԇ�(y��n)D��ÿ��(g��)��ԇ�ߵ�ƽ����(bi��o)��(zh��n)ƫ���L�Ƶ�ƽ�����������������������������͘�(bi��o)��(zh��n)ƫ��ֵ�˴˸߶����P(gu��n)����b����ԇ�ߺ�ԇ�(y��n)��ÿ��(g��)�P(gu��n)��(ji��)��ƽ����(bi��o)��(zh��n)��Y(ji��)���c֮ǰ�u(p��ng)���Ă����������ஔ(d��ng)�� Ӌ(j��)��ICCֵ�Դ_���y(c��)��֮�g�Ŀ�׃�ԡ��ӽ�1��ICCֵ��ʾ�߿ɿ��ԣ����ӽ�0��ICCֵ��ʾ�Ϳɿ��ԡ���Ŀǰ���о��У����Мy(c��)ԇ��ƽ��ICC���ܸߣ�������0.87���Эh(hu��n)ABD����0.98��СMCP�����y(c��)ԇ���P(gu��n)��(ji��)�Ŀ��wƽ��ֵ��0.93��0.05����ˣ������������؏�(f��)�ԺͿɿ��Ժܸߣ���������ǰ�u(p��ng)���Ă�������������(n��i)�������u(p��ng)�������u(p��ng)����1��������������ӌ�(du��)�P(gu��n)��(ji��)���(d��ng)�Ե�Ӱ푳̶ȣ��҂�߀��(du��)����ͬ�r(sh��)��������������ԇ���M(j��n)���ˌ�(sh��)�(y��n)����1�������������ԭʼ������������������˂�������Ҫ����ԇ���Ƅ�(d��ng)��ָ��֮���ٴ�ԃ��(w��n)��(w��n)�}3�͆�(w��n)�}6�ɷN���ס���(w��n)�}3�Ĵ��ڃɷN����֮�g����ȵģ����(c��)��4.67��0.58���҂�(c��)��4.67��2.31������(du��)�چ�(w��n)�}6���b��ԭʼ�����������ף�5.33��0.58���ĽY(ji��)���Ժ����b�и��M(j��n)�����������ף�5.0��1.73������֮���@Щ�Y(ji��)���������c���ײ�����ȣ�����1��(du��)��ָ�P(gu��n)��(ji��)���ȵ�ؕ�I(xi��n)��С�� ӑՓ �����������ЏV���đ�(y��ng)���I(l��ng)����̓�M�F(xi��n)��(sh��)���C(j��)���˻�Ӌ(j��)��C(j��)�Α��e��Ȥ��������?c��)ڿ��?f��)�������u(p��ng)���еđ�(y��ng)�á���(du��)�����еđ�(y��ng)�ã����_�Ĝy(c��)�������ڲ����͵̓r(ji��)���ǂ����������������ԡ����@��҂���B��һ�N���������ף�������W_rzburg��W(xu��)�_(k��i)�l(f��)�ģ���˱��Q��-���ף����ƺ��M�����S���@Щ���c(di��n)�� ��������跀(w��n)���� ���˾��_�y(c��)�������������ķ�(w��n)�����Ǐ�(qi��ng)���Եģ�Simone��Kamper��2005�꣩��Ȼ����̼īˮ�������@ʾ���S���r(sh��)�g�����ƣ���(d��ng)�����������˥�p�����磬Abrams Gentile��������Abrams Gentile Entertainment Inc��New York��USA����30 s��˥�p����ʼ���ļs25%��Simone��Kamper��2005�꣩����(j��ng)�҂���(sh��)�(y��n)��δ�����ĽY(ji��)���C��(sh��)���������������w��ָ�\(y��n)��(d��ng)�����y(c��)���еđ�(y��ng)�á��҂��l(f��)�F(xi��n)����30 s��2''�����c(di��n)��������˥�p�ڼs6%�ķ�����(n��i)�����������(y��u)����ǰ����������菝����������Simone��Kamper��2005����3''�����c(di��n)��������˥�p�s9%�����چΪ�(d��)�Č�(sh��)�(y��n)�У��҂��l(f��)�F(xi��n)�ڏ���50��犺���������M(j��n)һ�����͵��s18%��ͨ�^(gu��)�ڂ����������ϰ��bһ�ӱ��������ϱ�Ĥ���@�N˥�p�����@�����͵�С��2%�ij̶ȡ���ˣ���1�����������ʽ������������һ��(g��)��Ҫȱ�c(di��n)�����������ȵ����P(gu��n)�����ںܴ�̶���Ӱ����Ñ������m�ԣ��@���ԏ��Ñ�������(w��n)���Ć�(w��n)�}3��6���ų�����(l��i)�����@Щ��(w��n)�}�У���ԇ��ֻ���X(ju��)����ָ�\(y��n)��(d��ng)���p���ƣ������X(ju��)��������֮�g�Č�(sh��)�|(zh��)�Բ���и��M(j��n)��������ԭʼ�����������ס� ���������� �ڶ���(g��)������������K���ׂ�������̖(h��o)��ͨ����늉����͏����Ƕ�֮�g�ľ����P(gu��n)ϵ��������ȡ�Q�ڂ����������{(di��o)��(ji��)�·��ʹ��һ��(g��)��̖(h��o)�{(di��o)��(ji��)�·�������������ɱ������D(zhu��n)�Q��늉���̖(h��o)����������K��̖(h��o)�ľ��Զ�Դ���H���ڂ�������衣�҂�ͨ�^(gu��)��һ��(g��)���ƽ���ڂ��������ļ�2���õ��˂��������͏����Ƕ�֮�g�ľ����P(gu��n)ϵ������ֻ��Ҫ�ɂ�(g��)�Ƕ�늉���(du��)��������ֵ��ƽ��λ�ú����������14��(g��)��������У��(zh��n)�r(sh��)�g�H��~10 s��(n��i)��ɡ��෴�������K늉���̖(h��o)�c�P(gu��n)��(ji��)�ǶȲ��ɾ����P(gu��n)ϵ���t��Ҫ���M(f��i)�����r(sh��)�g�M(j��n)��У��(zh��n)����~���о�����Ҫ30��犣�Simone����ͬ���о���5��(g��)��������Ҫ�s8��犣���߀��Ҫ�~����x����(sh��)��(j��)̎����Simone���ˣ�2007�꣩�����⣬�ĺ�������ľ��Դ_����������(g��)�Ƅ�(d��ng)������(n��i)�M(j��n)��A/D�D(zhu��n)�Q��Ă������ֱ��ʺ㶨����(d��ng)A/D�D(zhu��n)�Qǰ�ď�����̖(h��o)�c�����Ƕț](m��i)�о����P(gu��n)ϵ�r(sh��)��Ҳ����(hu��)���F(xi��n)�@�N��r�� ��ͬ�ֲ��ߴ����ԇ�ߵľ���׃����С���f(shu��)���ֲ��ߴ猦(du��)����Ӱ��^С��Ȼ�������˃�(y��u)�����Զȣ����Ԟ鲻ͬ�ߴ���֣�С���С����O(sh��)Ӌ(j��)���ף������m��(d��ng)�ߴ�����O(sh��)Ӌ(j��)����{(di��o)�����ą���(sh��)������Ⱥ�ƽ����������ͬ�ӣ����ʽ��������������һ��(g��)����Ҫ�����ԣ����������r(sh��)���`���ȓpʧ������ͨ�^(gu��)�����ą���(sh��)��(l��i)�������@Щ�Y(ji��)�����������ʽ�����������m���ڌ�(du��)���w��ָ�\(y��n)��(d��ng)������(g��)�����M(j��n)�о��Ԝy(c��)����δ��(l��i)�Ă����������{(di��o)��(ji��)�·����˹����M(j��n)�Ѓ�(y��u)�����҂�߀���y(c��)ԇ������������辀���D(zhu��n)�Q��늉���̖(h��o)������{(di��o)��(ji��)�·�������@�ӵ��O(sh��)�ã����Ի�m��ͬ�ֲ��ߴ����ԇ�ߵľ���׃����С���f(shu��)���ֲ��ߴ猦(du��)����Ӱ��^С��Ȼ�������˃�(y��u)�����Զȣ����Ԟ鲻ͬ�ߴ���֣�С���С����O(sh��)Ӌ(j��)���ף������m��(d��ng)�ߴ�����O(sh��)Ӌ(j��)����{(di��o)�����ą���(sh��)������Ⱥ�ƽ����������ͬ�ӣ����ʽ��������������һ��(g��)����Ҫ�����ԣ����������r(sh��)���`���ȓpʧ������ͨ�^(gu��)�����ą���(sh��)��(l��i)�������@Щ�Y(ji��)�����������ʽ�����������m���ڌ�(du��)���w��ָ�\(y��n)��(d��ng)������(g��)�����M(j��n)�о��Ԝy(c��)����δ��(l��i)�Ă����������{(di��o)��(ji��)�·����˹����M(j��n)�Ѓ�(y��u)�����҂�߀���y(c��)ԇ������������辀���D(zhu��n)�Q��늉���̖(h��o)������{(di��o)��(ji��)�·�����@�N�O(sh��)���£����Ի��������{(di��o)��(ji��)�·ֱ�ӈ�(zh��)�У�������Ҫ�~�����衣��(j��)�҂���֪��-�����ǵ�һ�N�����O(sh��)Ӌ(j��)�����þ�����菝������������˽Y(ji��)���˵͂������ɱ�������Ă��������ԡ����⣬���Ŀɿ��Ժ��؏�(f��)�Զ��ܸߡ� �؏�(f��)�ԺͿɿ��� �mȻ���ڎN���úͷ����Â��������ף���ֻ���ٔ�(sh��)�о�ϵ�y(t��ng)��Փ������ɿ��Ժ͜�(zh��n)�_�ԣ�Dipietro���ˣ�2003�ꣻMentzel���ˣ�2001�ꣻSimone���ˣ�2007�ꣻWise���ˣ�1990�꣩���c�@Щ������������ȣ������؏�(f��)�ԺͿɿ��ԽY(ji��)�����ƣ���2������D6b��ʾ��MCP��PIP��ABD��Ĵָָ��(sh��)ABD���⣩�P(gu��n)��(ji��)��SDֵ֮�g�](m��i)���@������@����ԓ���ķ�����SDֵ�����c��䲻ͬ��������ͺͲ�ͬ��������(sh��)���������M(j��n)�б��^��Ĵָָ��(sh��)ABD�P(gu��n)��(ji��)���^���`������c�����ς�������λ�����P(gu��n)���@���ܲ�����ѵġ��ڶ���(g��)�e(cu��)�`Դ�������؏�(f��)�ԅf(xi��)�h������������������ָ���ģ��؏�(f��)��ԇ�(y��n)�ĽY(ji��)�����H�܂��������ļ��g(sh��)���Ե�Ӱ푣�߀���T��������Dipietro���ˣ�2003����Ĵָ����ָ���õ�Сƫ������ص�Ӱ푡��҂�?c��)��Dͨ�^(gu��)ָ��(d��o)��ԇ���ԱM����С����ץסģ�ߣ����O(ji��n)�y(c��)�ֵĺ㶨λ�Á�(l��i)�M���p���@ЩӰ푡��M�����@ЩӰ푣���(bi��o)��(zh��n)ƫ��H��1.59�㣬�@��ӳ�˸ߜy(c��)���؏�(f��)�ԡ�ICCS��(du��)�ɿ����M(j��n)���˶����u(p��ng)����������0.81�C0.99���P(gu��n)��(ji��)�gƽ��ֵ��0.93�����cSimone�����u(p��ng)���������ஔ(d��ng)����Simone���ˣ�2007�꣩��ICCS��0.79��0.99��ƽ��ֵ��0.95����Dipietro���ˣ�Dipietro���ˣ�2003�꣩��ICCS��0.7��1.0����Mentzel���ˣ�Mentzel���ˣ�2001�꣩��ICCS��0.82��0.99��ƽ��ֵ��0.94���M���ڱ��о��У�ԇ�(y��n)����������ͬ������ˣ������؏�(f��)�ԺͿɿ����c�����u(p��ng)���������ƣ�Ҳ���ք�(d��ng)�y(c��)�ǵĜy(c��)���ɿ��Է�����(n��i)��Wise���ˣ�1990�꣩�� �c��(sh��)�H��(y��ng)�����P(gu��n)�Ć�(w��n)�} ͨ�^(gu��)�Ñ�������(w��n)���u(p��ng)�����Ñ����ܶȺ��m���Զ��ܸߡ��@�����IJ��������Ñ����ܞ���r(ji��)��ɵġ�ͨ�^(gu��)ʹ�����m��(y��ng)��ͬ���ֳߴ磬����(y��u)�����ԿɔU(ku��)չ������չ�\(y��n)��(d��ng)����������(sh��)�����M(j��n)һ��������m�Ժ͜y(c��)�����ȡ��M(j��n)һ����(y��u)���Ñ����m�Ⱥ��������������������g����һ�N�������������cӋ(j��)��C(j��)֮�g�ğo(w��)����(sh��)��(j��)��ݔ��Ȼ����-����Ŀ������TMS�h(hu��n)���й�������������ҿ���׃���Ĵň�(ch��ng)�����_(d��)2��˹������TMS�h(hu��n)�����ܕ�(hu��)��(du��)�o(w��)����(sh��)��(j��)��ݔ��ɸɔ_��ͨ�^(gu��)�������ϲ��³��������������������늚�Ԫ�������Ԍ��@Щ���ܵ��ⲿ�ɔ_������͡��ڵ�һ��ʹ��TMS�Č�(sh��)�(y��n)�У��҂��](m��i)�аl(f��)�F(xi��n)�κδ̼���Ӱ���������̖(h��o)��ʧ�棬�@���������c�@�N��(j��ng)�������g(sh��)�ĽY(ji��)���ǿɿ��IJ������ֲ�ʽ�O(sh��)Ӌ(j��)�ĵڶ���(g��)��(y��u)�c(di��n)�ǣ���ͬ���{(di��o)��(ji��)�·�����ڲ�ͬ�����ף����磬���ڲ�ͬ���ֳߴ磩���M(j��n)һ�������˳ɱ�����������ȵ�����`���ԣ��{(di��o)��(ji��)��Ԫ��ÿ��(g��)�������ṩ����Ƶ�ݔ������ˣ��������B�ӵ��κ�A/D�D(zhu��n)�Q�������磬���Sʹ�ìF(xi��n)�е�Ӳ���O(sh��)��ͬ�r(sh��)ͬ��ӛ䛼����̖(h��o)����ָ�\(y��n)��(d��ng)�����ͨ�^(gu��)���������λӋ(j��)��(y��u)�����Ă������ֱ��ʣ�~0.1�㣩�ֲ�ʽ�O(sh��)Ӌ(j��)�ĵڶ���(g��)��(y��u)�c(di��n)�ǣ���ͬ���{(di��o)��(ji��)�·�����ڲ�ͬ�����ף����磬���ڲ�ͬ���ֳߴ磩���M(j��n)һ�������˳ɱ�����������ȵ�����`���ԣ��{(di��o)��(ji��)��Ԫ��ÿ��(g��)�������ṩ����Ƶ�ݔ������ˣ��������B�ӵ��κ�A/D�D(zhu��n)�Q�������磬���Sʹ�ìF(xi��n)�е�Ӳ���O(sh��)��ͬ�r(sh��)ͬ��ӛ䛼����̖(h��o)����ָ�\(y��n)��(d��ng)�����ͨ�^(gu��)�{(di��o)��(ji��)�·���λӋ(j��)���ԃ�(y��u)�����Ă������ֱ��ʣ�~0.1�㣩�����ұȴ����(sh��)�������������ķֱ��ʣ���0.2�㵽0.5�㲻�ȣ����ߡ����磬CybergLove®II�����x�ֱ��ʼs��0.5�㣬�@��(du��)��ӛ�С��ָ�\(y��n)��(d��ng)����TMS���ܲ�����ѵģ�Gentner��Classen��2006�꣩�� �Y(ji��)Փ ����(b��o)���е������ṩ�˿ɿ��ľ��Ը߷ֱ����P(gu��n)��(ji��)�Ƕ���̖(h��o)������Ԫ���IJ��ϳɱ�����500��Ԫ����һЩ���Â��������ăr(ji��)��ͼs10-20�����҂�߀�l(f��)�F(xi��n)�����ğo(w��)ȱ�ݲ������cTMS���P(gu��n)�Ĵ�ň�(ch��ng)�е��Ա������@������������������W(xu��)�о��������b�ã���Gentner��Classen��Gentner��Classen��2006�꣩������Ñ��ɽ������c֮ǰ�����Ă����������ஔ(d��ng)����(sh��)�ϣ������Ժ����؞�������������ͬ��С���֣��@ʹ�����ɞ�һ��(g��)�`��Ĝy(c��)��ϵ�y(t��ng)��Ҳ�����m�����о�������`�L(zh��ng)�(d��ng)�����ӣ����\(y��n)��(d��ng)�� ���ߕ�(sh��)� Adamovich SV��Merians AS��Boian R��Tremaine M��Burdea GS��Recce M��Poizner H�����L(f��ng)���ֲ�����(f��)��̓�M�F(xi��n)��(sh��)�\(y��n)��(d��ng)ϵ�y(t��ng)�������D(zhu��n)�ơ�����(gu��)늚��c��ӹ��̎��W(xu��)��(hu��)��(hu��)�h䛣�2004�ꣻ7:4936-9�� Beers MH��Berkow R.��Ĭ���\���c�ί��փ�(c��)������17�棬�s���������ӳ����磺�~�s��1999�ꡣ Boesnach I��Moldenhauer J��Burgmer C��Beth T��Wank V��B_S K��ͨ�^(gu��)��(j��ng)�W(w��ng)�j(lu��)���[�R���ɷ�ģ�͌�(du��)���w�\(y��n)��(d��ng)�A�εķ����(gu��)�H����Փ�c����ϵ�y(t��ng)��(hu��)�h���¼��£�2004:976-81�� Classen J��Liepert J��Wise SP��Hallett M��Cohen LG����(sh��)�`�T��(d��o)����Ƥ�|(zh��)�\(y��n)��(d��ng)�����Ŀ��ٿ����ԡ�����(j��ng)����W(xu��)�s־����1998�ꣻ79:1117-23��Dipietro L��Sabatini AM��Dario P.�ֲ��\(y��n)��(d��ng)�ɼ��x�������u(p��ng)����������(f��)�о��c�l(f��)չ����2003�ꣻ40:179-89�� Gentner R��Classen J�����w�И���(j��ng)ϵ�y(t��ng)��ָ�\(y��n)��(d��ng)��ģ�K���M������(j��ng)Ԫ��2006��52:731-42�� ���DMK���\(y��n)��(d��ng)����(f��)��̓�M�h(hu��n)��������W(w��ng)�j(lu��)�����О�W(xu��)��2005��8:187-211�� Hommel G��Hofmann FG��Henz J���D���ָ߾��Ȃ��������ס�1994�����m��W(xu��)���ČÇ�(gu��)�H�ƌW(xu��)��(hu��)�h��������Ȼ�ƌW(xu��)���(hu��)Փ�ļ����� Jerde Te��Soechting JF��F(xi��n)landers M.����s����(ji��n)�������ε��R(sh��)�e��IEEE Trans Biomed Eng��2003��50:265-9. Kessler-GD��L.H��N.W.���W(w��ng)�j(lu��)��������һ�Nȫ��ݔ���b�õ��u(p��ng)�r(ji��)����ACM Trans Comput Hum Interact��1995�ꣻ2:263-83�� ��˹��ϣ�����\(y��n)��(d��ng)Ƥ�ӻ�Ƥ�|(zh��)�������p�������(g��)�w��ָ�\(y��n)��(d��ng)�IJ�ԓp��������(j��ng)����W(xu��)�s־����2003�ꣻ90:1160-70�� ��˹��ϣ��������ָ��(d��)���ԣ�����(d��ng)�C(j��)е����c����(d��ng)��(j��ng)������Ƶľ����ԡ���(j��ng)����W(xu��)�s־��2004a��92:2802-10�� ��˹��ϣ�������\(y��n)��(d��ng)Ƥ�ӻ�Ƥ�|(zh��)�������ܓp�������(g��)�w��ָ�\(y��n)��(d��ng)�^(gu��)���У������x���Խ��͡�����(j��ng)����W(xu��)�s־����2004b��91:1722-33�� ÷ɭCR������˹JE�������{TJ�����Օr(sh��)�ֵąf(xi��)ͬ���á���(j��ng)����W(xu��)�s־��2001��86:2896-910�� �T(m��n)�ɠ���M����������F�����e��T��������B����Ɲ����L���ߺ��ء��������ø��X(ju��)���לy(c��)����ָ�P(gu��n)��(ji��)�Ƕȵ��٬F(xi��n)�ԡ�Handhchir Mikrochir Plast Chir��2001�ꣻ33:59-63�� Santello M��Flanders M��Soechting JF������ʹ�õ��˄�(sh��)�օf(xi��)ͬ���á���(j��ng)�ƌW(xu��)�s־��1998��18:10105-15�� Shrout PE�����R˹Jl.e��(n��i)���P(gu��n)�ԣ������u(p��ng)���u(p��ng)���߿ɿ��ԡ�������ͨ��(b��o)����1979�ꣻ86:420-28�� Simone LK��Kamper DG���O(sh��)Ӌ(j��)һ��(g��)�ɴ������@ʾ����(l��i)�y(c��)����ָ���˄�(sh��)����(j��ng)���̿���(f��)�s־��2005��2:5. Simone LK��Sundarrayan N��Luo X��Jia Y��Kamper DG��һ�N�ͳɱ��x�����ף��������L(zh��ng)�O(ji��n)�y(c��)�������u(p��ng)������(j��ng)�ƌW(xu��)�����W(xu��)�s־��2007��160:335-48�� Tsagarakis Ng��Kenward B��Rosander K��Caldwell DG��von Hofsten C�����냺���ס����о��냺�ֲ��\(y��n)��(d��ng)���ưl(f��)չ���b�á��W���|�X(ju��)��2006�ꡣWeiss EJ��F(xi��n)landers M.���w�ֵļ�����˄�(sh��)�f(xi��)ͬ���á�����(j��ng)����W(xu��)�s־����2004�ꣻ92:523-35�� Williams NW��Penrose JM��Caddy CM��Barnes E��Hose Dr��Harley P.A�R���Üy(c��)������Jerde Te��Soechting JF��F(xi��n)landers M.����s����(ji��n)�������ε��R(sh��)�e��IEEE Trans Biomed Eng��2003��50:265-9. Kessler-GD��L.H��N.W.���W(w��ng)�j(lu��)��������һ�Nȫ��ݔ���b�õ��u(p��ng)�r(ji��)����ACM Trans Comput Hum Interact��1995�ꣻ2:263-83�� ��˹��ϣ�����\(y��n)��(d��ng)Ƥ�ӻ�Ƥ�|(zh��)�������p�������(g��)�w��ָ�\(y��n)��(d��ng)�IJ�ԓp��������(j��ng)����W(xu��)�s־����2003�ꣻ90:1160-70�� ��˹��ϣ��������ָ��(d��)���ԣ�����(d��ng)�C(j��)е����c����(d��ng)��(j��ng)������Ƶľ����ԡ���(j��ng)����W(xu��)�s־��2004a��92:2802-10�� ��˹��ϣ�������\(y��n)��(d��ng)Ƥ�ӻ�Ƥ�|(zh��)�������ܓp�������(g��)�w��ָ�\(y��n)��(d��ng)�^(gu��)���У������x���Խ��͡�����(j��ng)����W(xu��)�s־����2004b��91:1722-33�� ÷ɭCR������˹JE�������{TJ�����Օr(sh��)�ֵąf(xi��)ͬ���á���(j��ng)����W(xu��)�s־��2001��86:2896-910�� �T(m��n)�ɠ���M����������F�����e��T��������B����Ɲ����L���ߺ��ء��������ø��X(ju��)���לy(c��)����ָ�P(gu��n)��(ji��)�Ƕȵ��٬F(xi��n)�ԡ�Handhchir Mikrochir Plast Chir��2001�ꣻ33:59-63�� Santello M��Flanders M��Soechting JF������ʹ�õ��˄�(sh��)�օf(xi��)ͬ���á���(j��ng)�ƌW(xu��)�s־��1998��18:10105-15�� Shrout PE�����R˹Jl.e��(n��i)���P(gu��n)�ԣ������u(p��ng)���u(p��ng)���߿ɿ��ԡ�������ͨ��(b��o)����1979�ꣻ86:420-28�� Simone LK��Kamper DG���O(sh��)Ӌ(j��)һ��(g��)�ɴ������@ʾ����(l��i)�y(c��)����ָ���˄�(sh��)����(j��ng)���̿���(f��)�s־��2005��2:5. Simone LK��Sundarrayan N��Luo X��Jia Y��Kamper DG��һ�N�ͳɱ��x�����ף��������L(zh��ng)�O(ji��n)�y(c��)�������u(p��ng)������(j��ng)�ƌW(xu��)�����W(xu��)�s־��2007��160:335-48�� Tsagarakis Ng��Kenward B��Rosander K��Caldwell DG��von Hofsten C�����냺���ס����о��냺�ֲ��\(y��n)��(d��ng)���ưl(f��)չ���b�á��W���|�X(ju��)��2006�ꡣWeiss EJ��F(xi��n)landers M.���w�ֵļ�����˄�(sh��)�f(xi��)ͬ���á�����(j��ng)����W(xu��)�s־����2004�ꣻ92:523-35�� Williams NW��Penrose JM��Caddy CM��Barnes E��Hose Dr��Harley P.�R���ֲ��u(p��ng)���Üy(c��)�����ס�ʩ����У��(zh��n)���(y��n)�C��J Hand Surg��2000�ꣻ25:200-7�� WISE S��GARDNER W��SABELMAN E��Valainis E��Wong Y��Glass K��Drace J��Rosen JM�����Ԅ�(d��ng)�y(c��)�ǜy(c��)���ù��w�����u(p��ng)�r(ji��)��������(f��)�о��c�l(f��)չ����1990�ꣻ27:411-24��
TAG��
��ӡ���(y��)
||
�P(gu��n)�]����
��һƪ��
������������
��һƪ��
I-Scan Lite��(ji��n)���͉����ֲ����y(c��)ϵ�y(t��ng)
(li��n)ϵ�Ԓ��0512-51910068�����棺
�KICP��2022001945̖(h��o)
���(qu��n)���У��K���L(zh��ng)�@��늿Ƽ�����˾ (li��n)ϵ��ַ�����Kʡ�����г����ؽ���(j��ng)��(j��)�_(k��i)�l(f��)�^(q��)�ĺ�·11̖(h��o)����Ƅ�(chu��ng)�@407 �L(zh��ng)�@�Ƽ����������®a(ch��n)Ʒ��Ĥ��������������W(xu��)�y(c��)�������⑪(y��ng)�ã����W(xu��)�y(c��)�����˹����ܣ� �a(ch��n)Ʒ�� tekscan�����ֲ��y(c��)ԇϵ�y(t��ng)��SPI Tactilus�����ֲ��y(c��)��ϵ�y(t��ng)��Qualisys�\(y��n)��(d��ng)��ϵ�y(t��ng)��CleanLaser������ϴϵ�y(t��ng)��NIEO LCD���S��W(xu��)�y(c��)��ϵ�y(t��ng)��J&C LED�e����F(xi��n)aro���S����x